
Digitale Antriebe
Digitaler Antrieb „Teach-In”
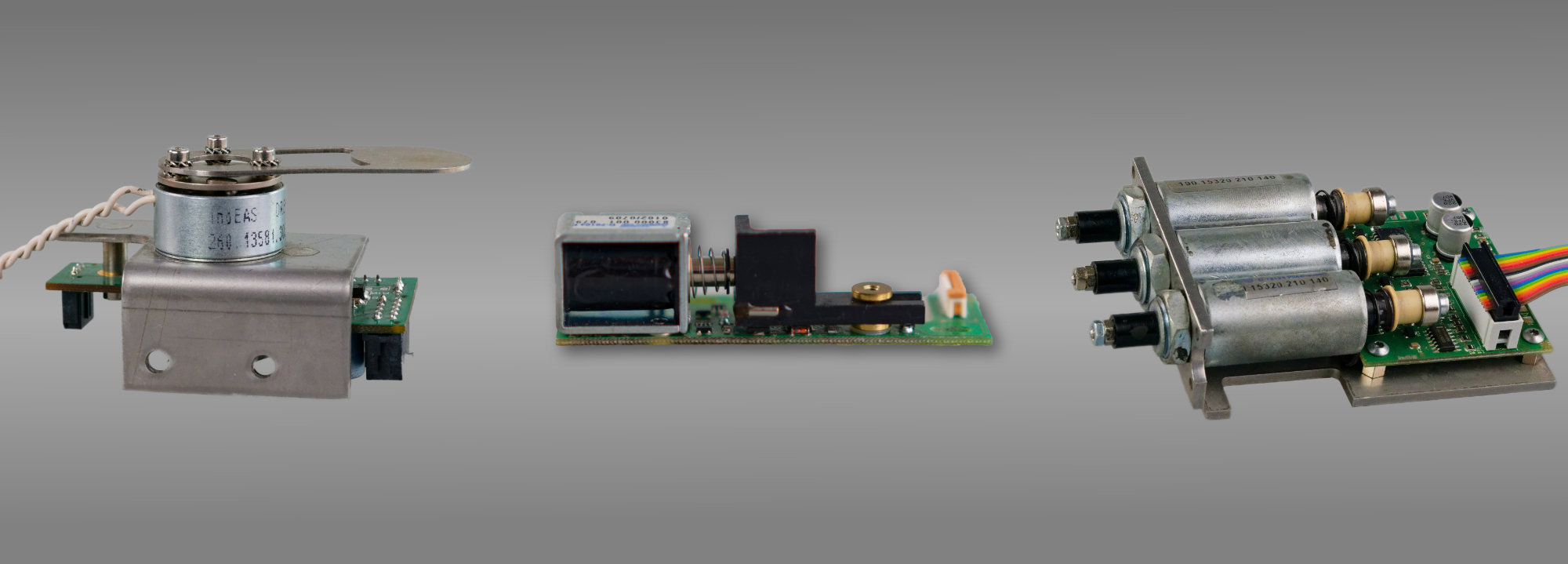
Eine Kombination aus Schrittmotor mit Sensorik, Endstufe und μ-Controller arbeitet als Positionierantrieb. Die integrierte Winkelsensorik liefert absolute Positionswerte der Welle mit einer Auflösung von 16 Bit. Durch einen kontinuierlichen Soll-Ist-Vergleich wird die Ist-Position der Welle bis zum Erreichen des Sollwertes nachgeführt.
Ausgehend von der so genannten „Nullposition“, die über eine Referenzfahrt definiert wird, können zwei Winkelpositionen abgerufen werden. Diese sind als Sollwerte im Speicher des Antriebs hinterlegt und können über den so genannten „Teach-In-Mode“ verändert und abgespeichert werden.